Vorsprung durch Technik: 25 Years of Audi quattro
 |
|||
|
|
|||
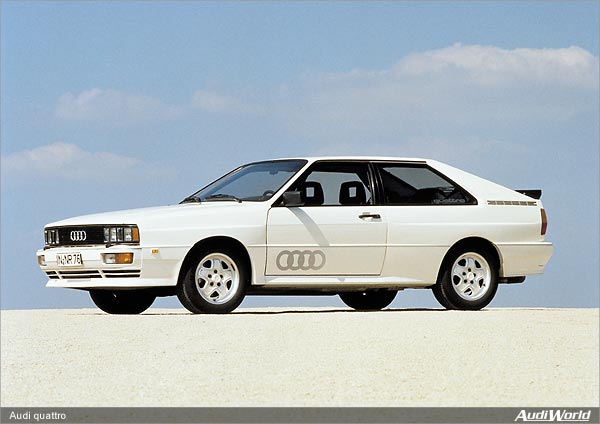
Four rings, seven letters, 25 years: Audi’s quattro technology is now celebrating a noteworthy anniversary. A quarter of a century ago, on March 3, 1980, the ‘original quattro’ was the centre of attention at the Geneva Motor Show in Switzerland. This was the birth of a legend which clocked up innumerable motor-sport victories and a demonstration of still unsurpassed supremacy on the road. Michèle Mouton, Stig Blomqvist, Hannu Mikkola and of course Walter Röhrl – these were the drivers that wrote a new chapter in rallying history during the 1980s and brought the Audi quattro four world championship titles. Before long, the cars with permanent all-wheel drive were enjoying equal success in circuit racing, including an overall win in the 1988 American TransAm series – and a truly triumphant year in 1996, when the A4 quattro Super Touring competition car gained the winner’s title in all seven national touring car championships for which it was entered. The quattro technological principle not only established itself impressively in motor sport, but in roadgoing cars as well, where quattro has come to mean not only permanent traction but also exceptional dynamism and fast, safe travel. The quattro technological principle has become a major element in the Audi brand’s success with all the market significance that this implies. In 2004, for instance, Audi built 209,469 quattro vehicles, and since 1980 more than 1,800,000 cars with this permanent all-wheel driveline have left the assembly lines – streets ahead of any other manufacturer of all-wheel-drive models. The quattro technical principle A car that distributes the power from its engine to all four wheels is capable of withstanding higher lateral locating forces than one with only the rear or front wheels driven. Its traction and cornering power are both superior to these more conventional drivelines. Audi clearly grasped this basic principle of physics with greater clarity and determination than its competitors – it was this awareness that inspired the initial quattro driveline concept. The development order for the all-wheel-drive project, bearing the internal company code 262, was issued in the spring of 1977. The basic stimulus came from three young Audi engineers: Jörg Bensinger was manager of the experimental running-gear department, Walter Treser was project leader and Dr. Ferdinand Piëch the chief technical executive. A modified Audi 80 with slightly lengthened wheelbase was used as a prototype, powered by the lengthwise installed five-cylinder turbocharged engine that was later to power the Audi 200 model. This transmitted its power to the all-wheel-drive system used on the VW Iltis military off-road vehicle, which Audi had developed. The driven rear axle was a second McPherson front axle turned through 180 degrees.
In January 1978, when tried out on the steep ‘Turracher Höhe’ mountain pass in the Styrian region of Austria, this prototype vehicle with the licence plate IN – NC 92 convincingly demonstrated its capabilities in the traction area, but on sharp, hard-surfaced corners there were evidently significant trapped stresses in the driveline. This situation arises because the front wheels follow a slightly larger curve than the rear wheels when the vehicle is cornering, and therefore have to be able to revolve slightly faster. The prototype was unable to cope with this situation, since unlike the Iltis with its driver-engaged drive to the front wheels, its two axles were rigidly connected. The Audi development team, however, held fast to its two main objectives: a permanent all-wheel driveline and the avoidance of a separate centre differential and second propeller shaft – components that were regarded as unavoidable on such vehicles back in the seventies. It was Franz Tengler, head of the transmission design department, who hit on the brilliantly simple notion of installing a 26.3 cm long drilled-out secondary shaft in the gearbox, so that power could flow in both directions. At the rear end, this shaft drove the spider of the manually lockable inter-axle differential; this device was integrated into the gearbox and transmitted 50% of the power from the engine to the rear axle, which had its own limited-slip differential. The remaining power flowed along an output shaft inside the hollow shaft to the front-axle differential. For the first time in automobile design history, this hollow-shaft concept permitted an all-wheel drive layout that was light in weight, compact and efficient. This was the decisive breakthrough, since it yielded a system that was not restricted to off-road vehicles with their high ground clearance but was ideal for sporty passenger cars. For the start of the 1987 model year, another important new feature was added to the quattro concept: the Torsen differential, a self-locking worm and gear unit that took the place of the manual differential lock. As the name (which comes from the term ‘torque sensing’) implies, this device redistributes engine torque steplessly as required for traction purposes, so that in extreme situations the axle with the better traction receives up to 75% of the available torque. Thanks to the Torsen differential, which develops its locking action only under load, the vehicle’s anti-lock braking system can still take effect when needed. Today, modern technologies such as electronically controlled differential locks in the axles and the ESP stabilisation program complement the action of the Torsen differential. |
||||||||
